






- On sale!

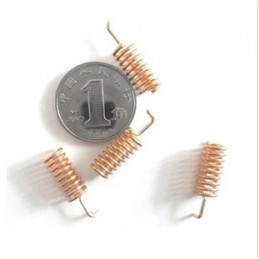
Reference: DWM14042301
Spring antenna is specialized for wireless data transmission. This antenna with good performance of V.S.W.R, small size design, easily installation, stable performance and good anti-shock and anti-aged compatible for Hoperf Modules.
Reference: DWM14032902
SMA rf antenna connector is pallets copper gold andexternal thread needle sma pallets plate rf connector.
Reference: DWM14032102
Whip antenna for sub-1 GHz, 433MHz,868MHz and 915MHz with SMA male connectors.it's used with wireless module recommanded by Hoperf .
Reference: DWM14042401
SMA RG178 extension female cable for GPS, GSM antenna,RF module, SMA cable,IPEX to SMA jumper cable.
Reference: DWM18032302
USD3.0/pcs MOQ100pcs LoRa Antenna designed for Lora application which required for outdoor waterproof highgain and work at ISM free band like 433MHz /868MHz /915MHz SMA Male Whip antenna.
Reference: DWM16121503
DWM-TLB-3.0QB SUB-1GHz / 2.4GHz Whip antenna with a Collapsible SMA male connectors.Which are available for 433MHz,868MHz.915MHz and 2.4GHz..
Reference: DWM17111002
LoRa Antenna-433MHz High Gain internal aerial piamater FPC Antenna with IPEX connctor.
Reference: DWM15101001
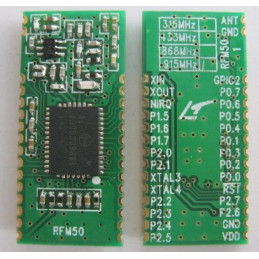
Brand: Semtech
RFM50 module series’ design is based on the high performance RF50 SoC chip, It include a CIP-51 core‘ MCU and 100mW transceiver. It operate at 433/470/868/915 MHz ISM band, comply with FCC, ETSI regulation.

The Balanbot is a Arduino Based Self-balancing Robot Kit.It's Open Source and easy to assemble.
Features
Easy to assemble
Controllable by Arduino UNO
Open Source Hardware and Software
High stability
High expendability
Specs
Working Voltage: 12~15VDC
Size (L*W*H): 21.6*6.8*13.2cm
Packaged Weight: 850g (Excluding UNO and EB modules)
Acrylic board color: Red, Black, and Transparent available
Typical Control Demonstration
To meet different needs, we implemented several ways to control the Balanbot. We believe the applications of Balanbot are unlimited and up to its users and their favorite devices and platforms.
Hardware Design
The Balanbot includes everything you need to make your own self-balancing robot: two high torque and high speed gear motors, wheels, acrylic structures, 18650 battery holder (batteries are not included), Balance Shield, and Arduino UNO-compatible board.The Balanbot uses one 5mm and two 3mm thick acrylic boards and other accessories for its main structure. The 5mm board is used to fix the two motors. One of the 3mm boards is used to fix the battery and the other is for an Arduino-compatible board plus the Balance Shield.The Balanbot is super easy to assemble and play! There are no complicated connections and it is fast to put together. It is suitable for kids and experienced makers as well. Thanks to the powerful Balance shield, it is much easier now to create a balancing robot than it was before.The Balance Shield uses an MPU6050 which is the world’s first integrated 6-axis motion-tracking device that combines a 3-axis gyroscope and a 3-axis accelerometer. It connects to the Arduino UNO compatible board through the I2C interface. With this sensor, you can get stable angle when the Kalman filter is used.The Balance Shield also integrated one L298P for driving motors. The L298P is a high voltage (50V), high current (2A) dual channel full-bridge driver. It can drive inductive loads such as relay, DC, and stepping motors.There are also led indicators, a power switch and a buzzer on the Balance Shield. You can even write your own code to make it play a melody.A universal serial interface is left for connecting adapters like serial Bluetooth and serial Wi-Fi for communicating with other devices. Four IO pins are left for connecting other sensors or RC receiver for making it more extensible.
Useful Link: Balanbot Assembly Instruction
Shipping List
|
Type |
Item |
Spec |
Qty |
|
|
Structures |
Acrylic Board |
Thickness5mmfor base |
1 |
|
|
Acrylic Board |
Thickness3mmfor battery |
1 |
||
|
Acrylic Board |
Thickness3mm for UNO |
1 |
||
|
Motor Bracket |
Metal |
2 |
||
|
Wheels |
65mm |
2 |
||
|
Even coupling |
6mm |
2 |
||
|
Copper Spacer |
Female to female,10mm |
6 |
Add 2 more |
|
|
Nylon Spacer |
Female to female,10mm |
6 |
Add 2 more |
|
|
Copper Spacer |
Female to male, 35mm+6mm |
5 |
Add 1 more |
|
|
Electronics |
Gear motor |
12V, 1:43.8 |
2 |
|
|
Balance Shield |
For Arduino UNO |
1 |
||
|
Battery holder |
For 3*18650batteries |
1 |
||
|
DC connector |
DC21, Male |
1 |
||
|
MCU board |
Makerduino UNO |
1 |
Balanbot UNO Kit |
|
|
Bluetooth 2.0 |
EB-Bluetooth 2.0 |
1 |
Advanced Balanbot Kit |
|
|
Bluetooth 4.0 |
EB–Bluetooth4.0 (BLE) |
1 |
Advanced Balanbot Kit |
|
|
Screws |
Screws for motor |
M3,6mm |
8 |
|
|
Screws for even coupling |
M3,6mm |
4 |
Add 2 more |
|
|
Screws for wheels |
M4,6mm |
2 |
||
|
Screws for battery holder |
M3, 8mm |
4 |
||
|
Nut |
M3 |
15 |
Add 5 more |
|
|
Screws |
M3, 6mm |
12 |
Add 4 more |
|
|
Screws |
M3, 8mm |
12 |
Add 4 more |
|
|
Screws |
M3, 12mm |
12 |
Add 4 more |
|
|
Accessories |
Bobbin |
Diameter 6mm,length 10cm |
1 |
|
|
Cable ties |
>200mm |
4 |
||
|
Screwdriver |
Straight screwdriver |
1 |
Reference: DWM14032106
The Arduino Uno Rev3 is a microcontroller board based on the ATmega328.
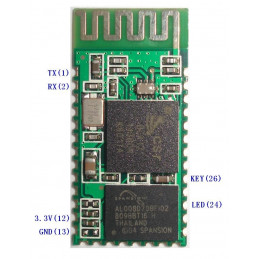
Reference: DWM14032906
HC-05 /HC-06 Bluetooth serial pass-through module wireless serial communication from machine Wireless HC-06 for arduino Bluetooth Module.
Reference: DWM16122202
Blinkgogo-The Best Present Designed for STEM education, Open Source! APP controlled, Arduino, supports Scratch, Bluetooth Upload, Robot. Let kids Play and Learn!
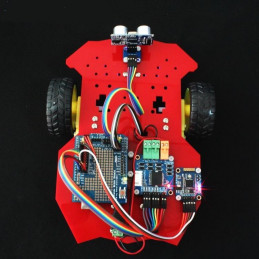
Reference: DWM15090901
DWM-2WD Smart Car Kit is an kit base on the Arduino UNO with Bluetooth Control.
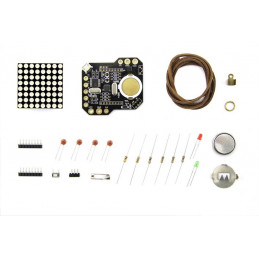
Reference: DWM15090902
8 SQUARE Heartbeat Necklace Soldering Kit for Arduino UNO R3 Starter Kit placa man.
The Balanbot is a Arduino Based Self-balancing Robot Kit.It's Open Source and easy to assemble.